About Me
Hi there! I’m Amin, a PhD student at McGill University’s Mobile Robotics Lab. My research focuses on imitation and reinforcement learning with safety certificates, applied to real-world robotic systems. Here, you can find a summary of my recent and previous work and experiences.
- Imitation Learning
- Robot Learning and Control
- Embodied Artificial Intelligence
- Reinforcement Learning
- Learning Dynamical Systems
PhD, ECE, Robotics
McGill University | Mila
BSc, ECE, Digital Systems
Sharif University of Technology
Minor, CS, Artificial Intelligence
Sharif University of Technology
I believe that prioritizing research into the safety of decision-making systems will enable the swift and responsible real-world deployment of cutting-edge AI advancements. My research is focused on safe and robust imitation and reinforcement learning for robotic systems, with a special emphasis on two key areas: out-of-distribution recovery and generalization through neural ordinary differential equations. This not just about advancing theory; it is about ensuring the practical deployment of safe and reliable policies into a variety of real-world robotic systems.
If anything that you see here sounds interesting to you, please reach out to ask questions or collaborate 😃
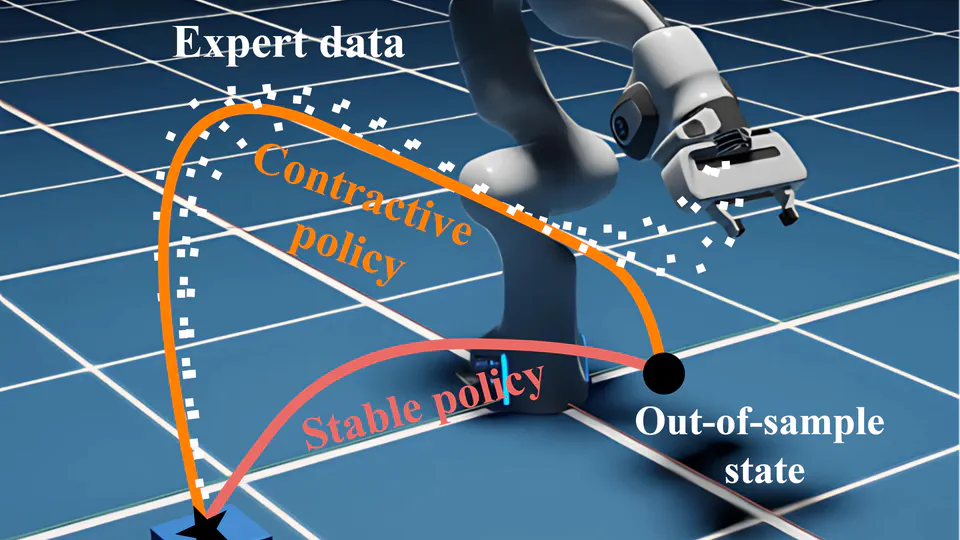


Our paper on contractive dynamical imitation policies will be a part of ICLR 2025 in Singapore. If you're in Singapore around that time, come to our poster session, 10:30–12 in Hall 3/2B, no. 39 to talk safe robotics 🤖!
Apr 16, 2025

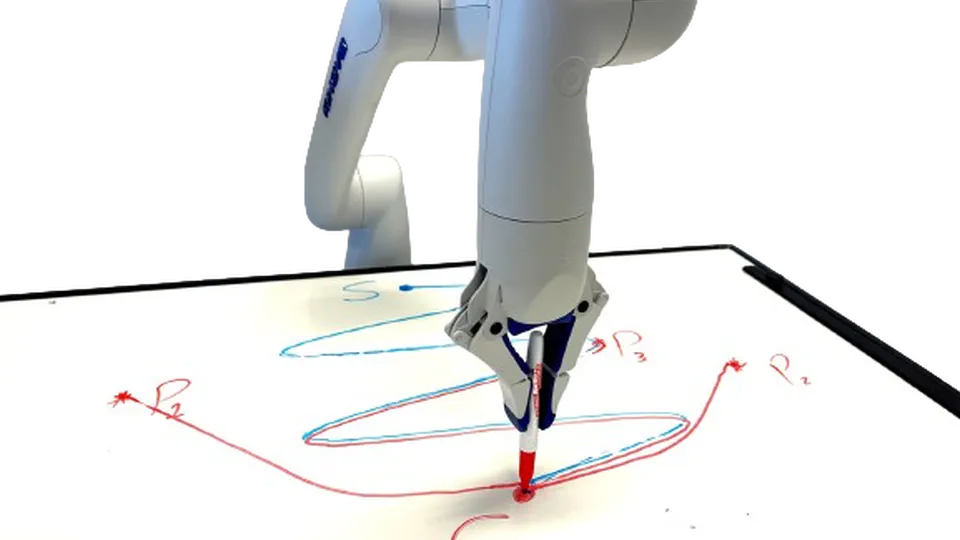
Our paper on globally stable neural imitation policies will be a part of ICRA 2024 in Japan. Meet us at the Wednesday's poster session for more discussion if you're in Japan at that time!
Feb 16, 2024