Amin Abyaneh
I’m a PhD candidate in AI and Robotics at McGill and Mila, advised by Prof. Hsiu-Chin Lin, where I work on robot learning, reinforcement learning, and world modeling. Early in my PhD, I focused on motion planning with provable stability guarantees grounded in the theory of dynamical systems. That foundation still shapes how I work: I’m especially drawn to diffusion-based methods and to grounding modern architectures in the same mathematics, which brings structure and reliability to learned behavior. More recently, I’ve turned toward multimodal learning as a way to give robots richer, more complete pictures of their surroundings, particularly by learning from tactile signals and contact forces.Outside of research, I enjoy volleyball, Flamenco guitar, boxing, and the occasional run.
Latest Updates
Paper
Jun 2026
Paper
Jun 2026
Paper
Jun 2026
Lecture
Mar 2026
Guest lecture at COMP 765 (Robot Learning) on diffusion policies and contraction theory.
Paper
Jan 2026
Publications
Preprint 2026
Drift Q-Learning
Preprint 2026
Toward Hardware-Agnostic Quadrupedal World Models
ECCV 2026
Tactile Modality Fusion for Vision-Language-Action Models
ICLR 2026
Contractive Diffusion Policies
RA-L 2026
VOCALoco: Viability-Optimized Cost-Aware Adaptive Locomotion
ICLR 2025
Contractive Dynamical Imitation Policies for Efficient Out-of-Sample Recovery
ICRA 2024
Globally Stable Neural Imitation Policies
CoRL 2023
Learning Lyapunov-Stable Polynomial Dynamical Systems through Imitation
Preprint 2022
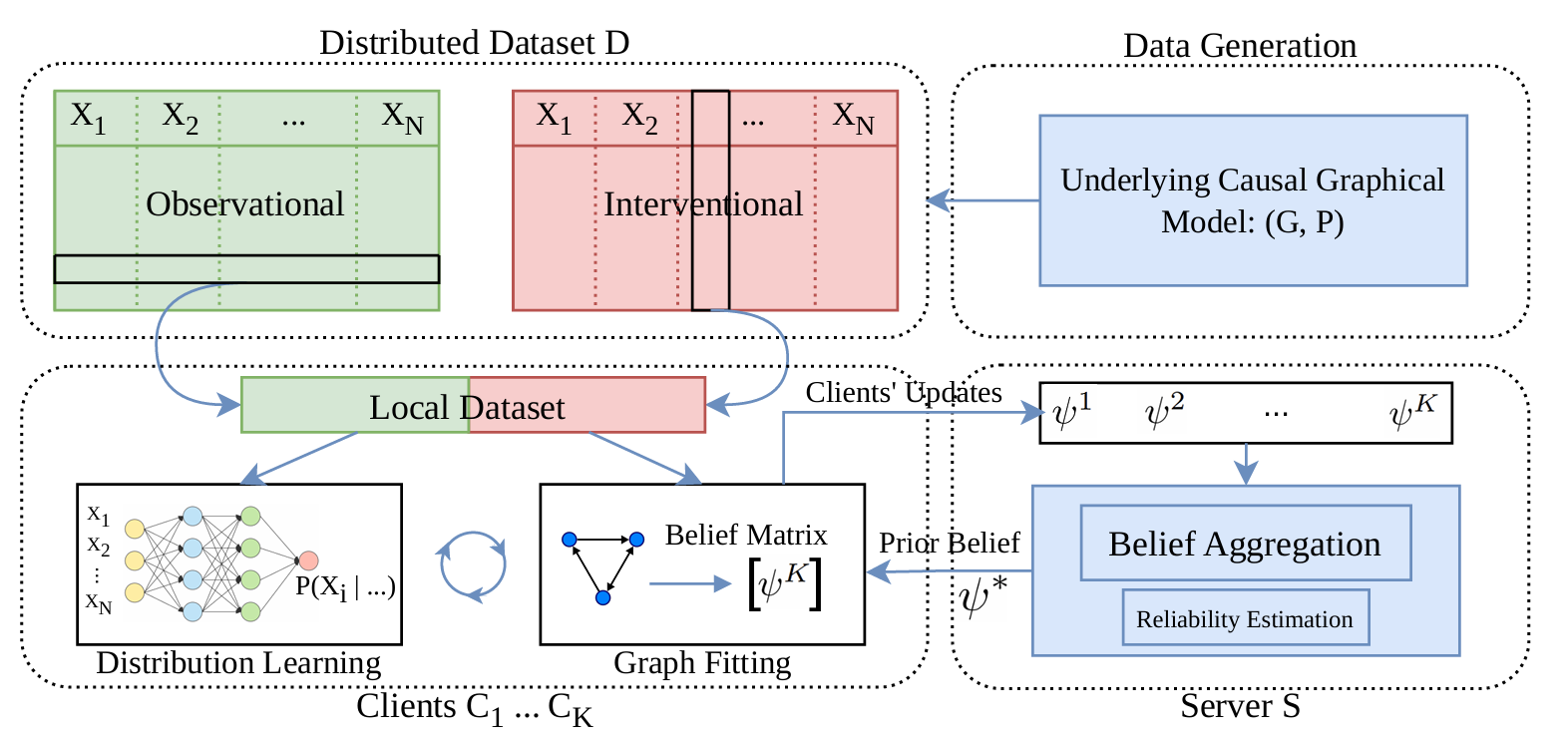
Federated Causal Discovery From Interventions