National Organization for Development of Exceptional Talents (NODET)
This was our high school project at NODET, the Iranian national organization for gifted students. The goal was to build a team of small autonomous robots that could play soccer: chasing a ball, positioning, attacking, and defending, all on their own.
It turned out to be a collection of firsts.
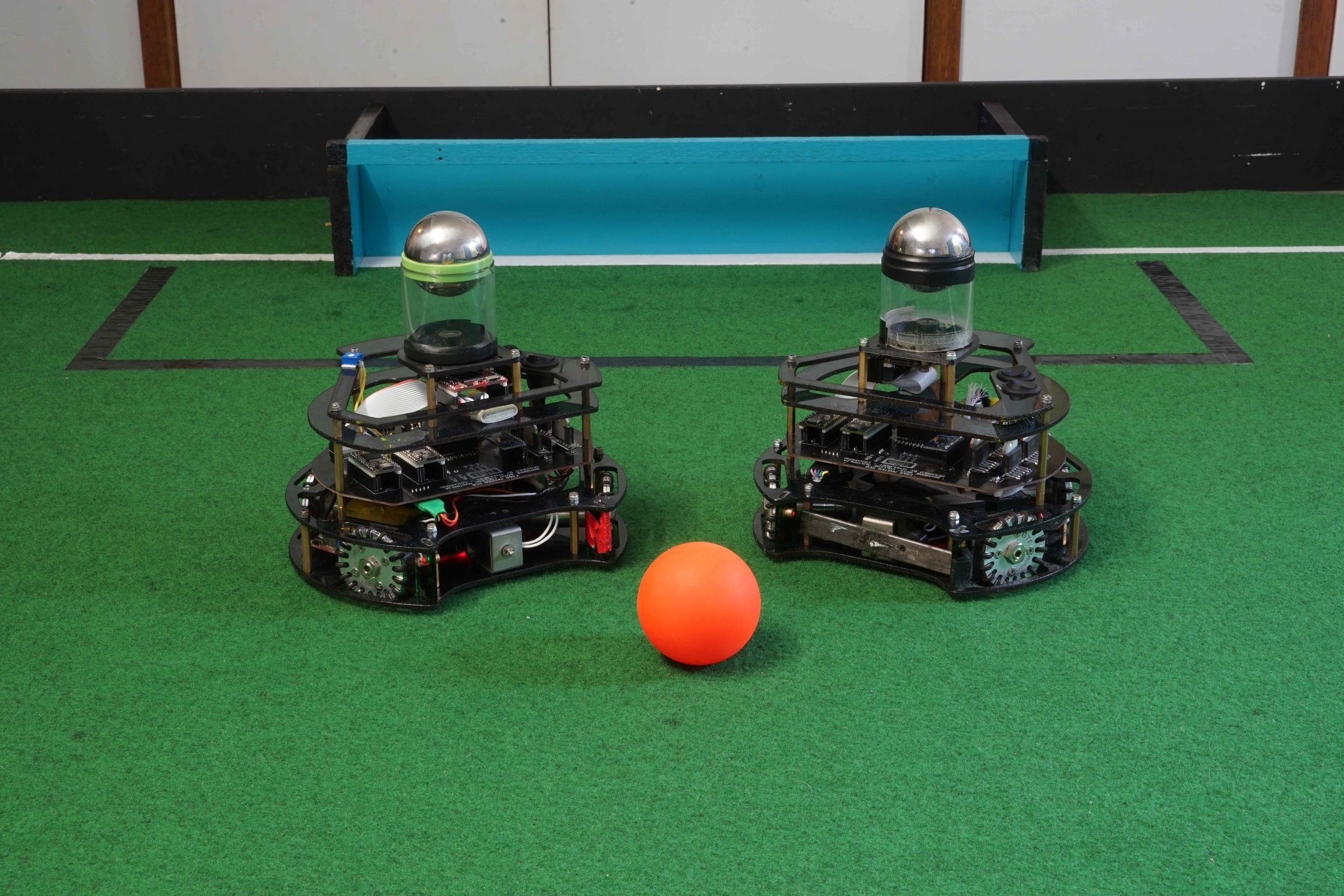 Photo: RoboCup Junior Soccer
Photo: RoboCup Junior Soccer
The robots
The soccer ball had IR emitters inside, and the robots tracked it using infrared receivers mounted around the chassis. Ultrasonic sensors took care of obstacle detection and distance to walls and other robots.
Everything ran on an ATMEGA32 microcontroller, an 8-bit AVR chip. We designed the PCB from scratch, which mostly meant learning what not to do by doing it wrong first and then fixing it.
The software
Our first time writing C for anything real. The code handled:
- Reading IR sensor arrays to figure out where the ball was
- Reading ultrasonic sensors for proximity
- A positioning controller to keep the robot near the center of the field
- Simple logic to switch between attack (ball ahead) and defence (ball behind or near own goal)
No libraries, no OS, just registers and loops. Frustrating and fun in equal measure.
Looking back
The controller we wrote was basically a state machine with a bunch of if-statements. Not so different, conceptually, from what I now study as dynamical systems and control theory. At the time we just wanted the robots to score a goal.
Also worth mentioning: most of the friends from that robotics lab are still some of my closest friends today. Good projects have a way of doing that.
High school project, NODET, Iran, 2012–2014.