Links
The problem
World models are powerful but brittle. A model trained on one quadruped fails on another the moment the leg lengths, actuator specs, or mass distribution shift. Every new robot means a new model, which defeats the point of having a learned world model at all.
QWM
QWM extends DreamerV3 with explicit morphology conditioning so the same model can reason about multiple robots at once. Three additions do the work:
- A Physical Morphology Encoder that turns kinematic, geometric, and actuation specs into a compact embedding
- Morphology-conditioned recurrent dynamics that inject this embedding at each step so predictions are robot-aware
- An Adaptive Reward Normalizer to handle the different reward scales that come with heterogeneous hardware

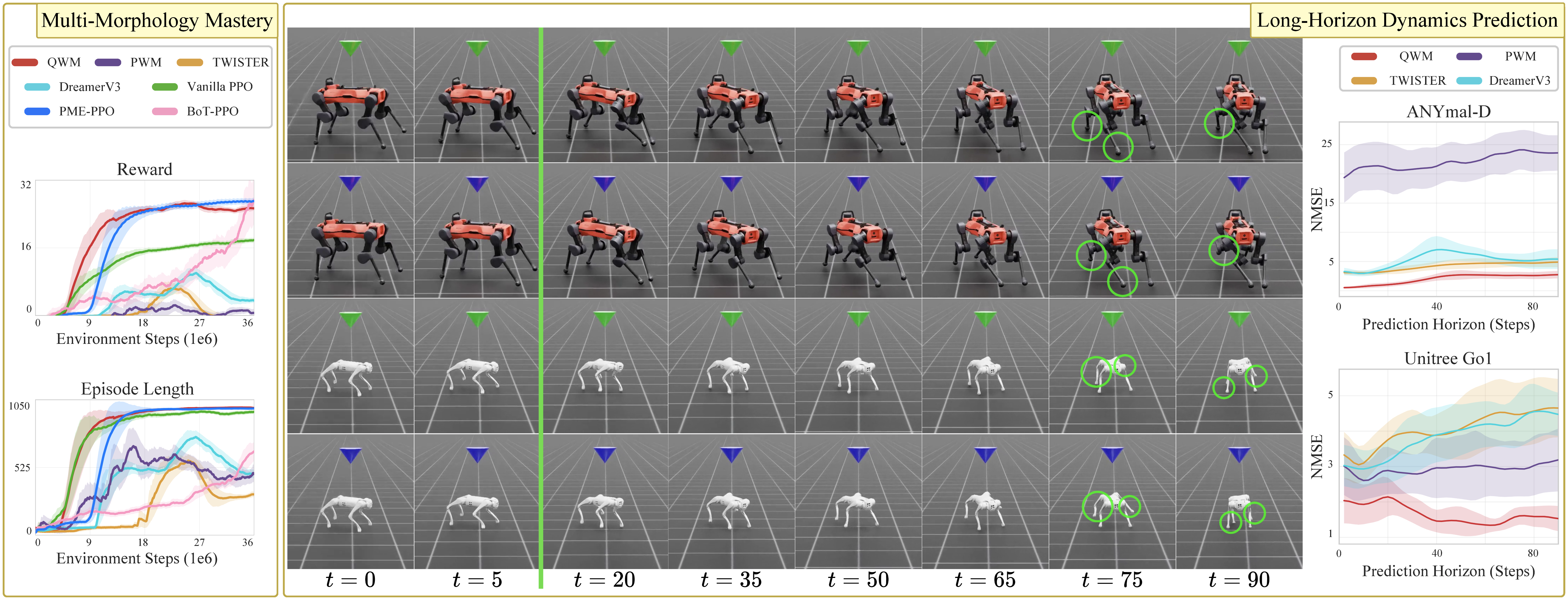
Training runs across eight distinct quadrupeds in parallel using Hetero-Isaac, a custom extension of NVIDIA Isaac Lab built for this purpose.
Results
A single QWM generalizes zero-shot to Unitree Go1 and ANYmal-D, both held out during training, with zero falls across 20 trials and no fine-tuning. It outperforms DreamerV3, PWM, and TWISTER on the full heterogeneous robot cohort.
Citation
@article{danesh2026qwm,
author = {Danesh, Mohamad H. and Li, Chenhao and Abyaneh, Amin and Houssaini, Anas and Ellis, Kirsty and Berseth, Glen and Hutter, Marco and Lin, Hsiu-Chin},
title = {Toward Hardware-Agnostic Quadrupedal World Models via Morphology Conditioning},
journal = {Preprint},
year = {2026},
}