Links
The problem with end-to-end locomotion
Most legged locomotion approaches train a single end-to-end deep RL policy to handle everything. That works fine in familiar terrain, but when a staircase shows up, or the surface changes, the policy has no way to know it’s struggling. There is no fallback, and safety and efficiency both take a hit.
What VOCALoco does
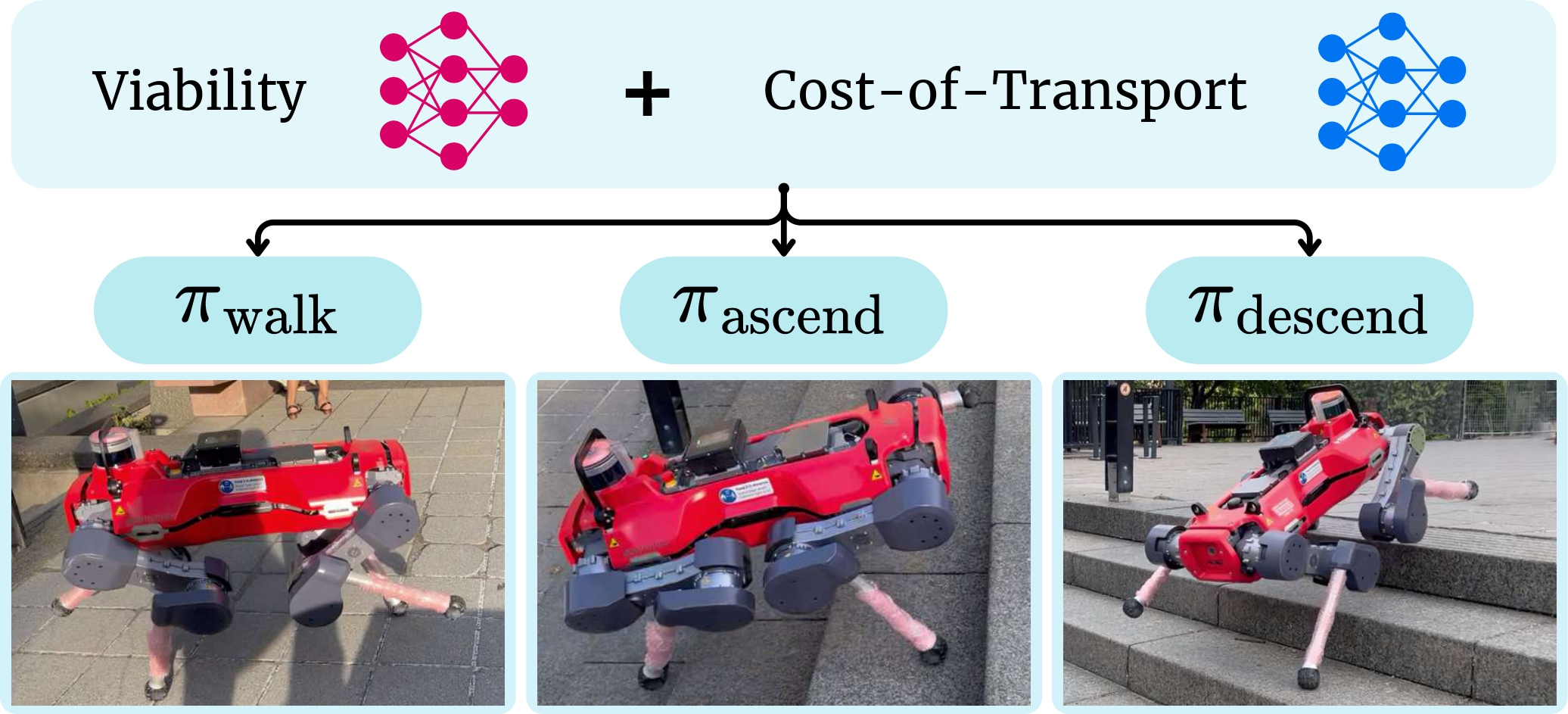
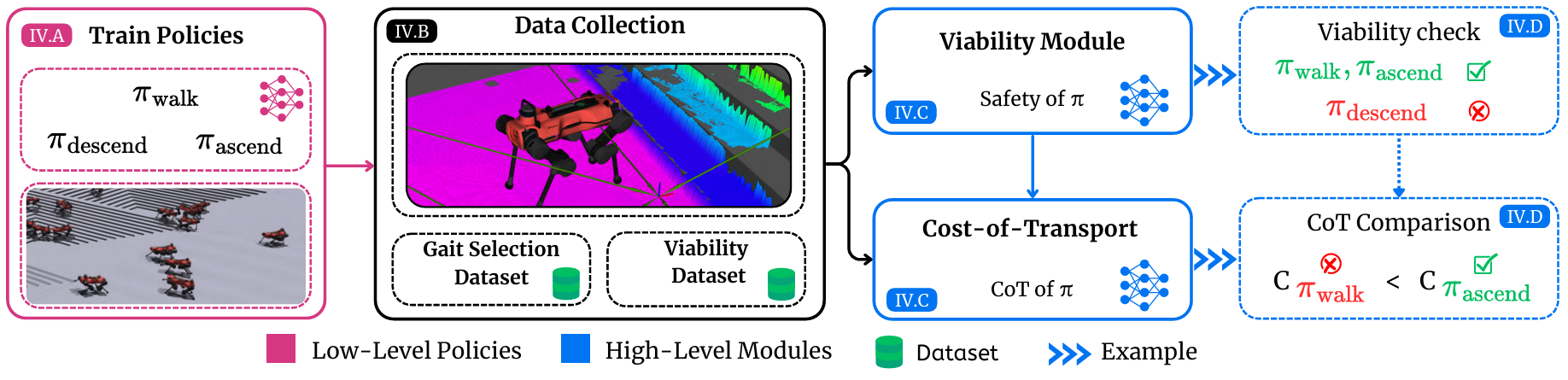
VOCALoco takes a modular approach. Rather than one policy doing everything, the robot has a repertoire of locomotion skills (walking, stair climbing, and more) and learns a selector that picks the best one given the terrain ahead. New skills can also be added to this repertoire over time, for example jumping, without retraining the others. From a local heightmap, the selector jointly predicts:
- Viability: will this skill execute safely on the terrain ahead?
- Cost of transport: how energy-efficient will it be?
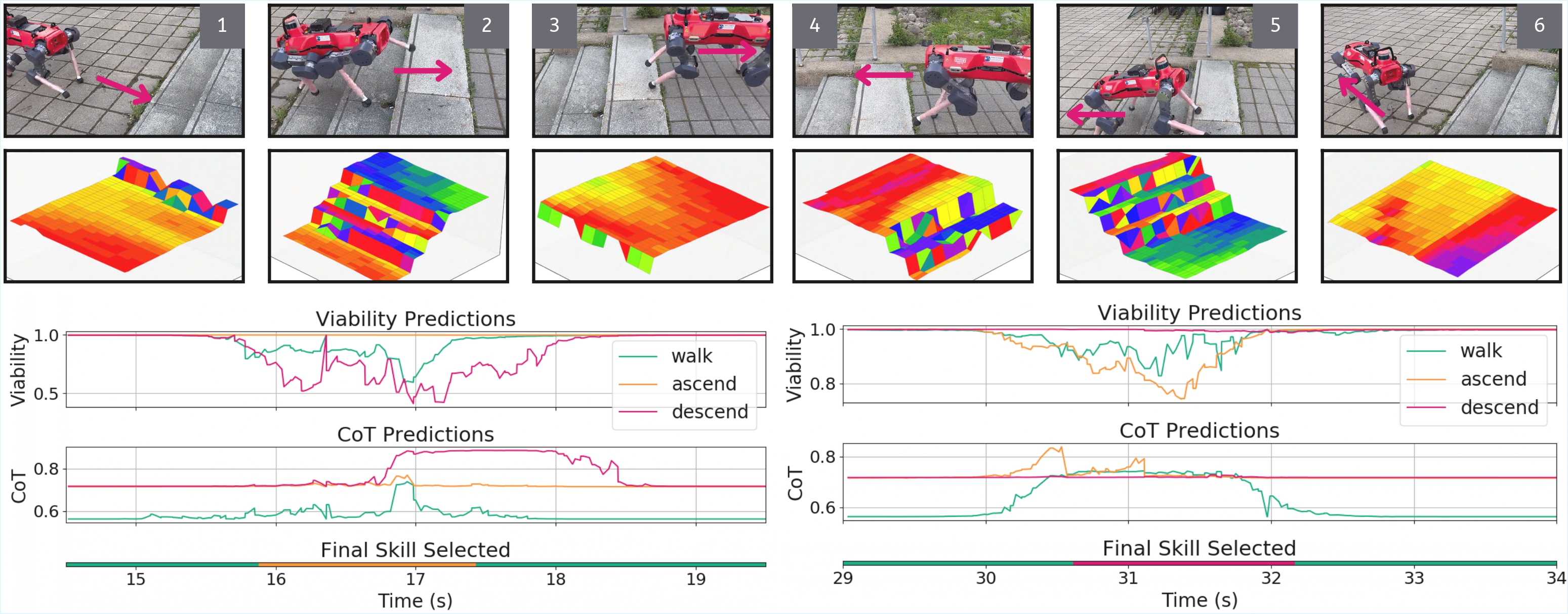
The robot then picks whichever skill scores best on both, adapting as the terrain changes.
Experiments
We evaluate on staircase locomotion tasks in both simulation and on a real quadrupedal robot. VOCALoco is more robust and safer during stair ascent and descent compared to a conventional end-to-end policy, and transfers zero-shot to real hardware.
Citation
@ARTICLE{Wu2026Vocaloco,
author={Wu, Stanley and Danesh, Mohamad H. and Li, Simon and Yurchyk, Hanna and Abyaneh, Amin and Houssaini, Anas El and Meger, David and Lin, Hsiu-Chin},
journal={IEEE Robotics and Automation Letters},
title={VOCALoco: Viability-Optimized Cost-Aware Adaptive Locomotion},
year={2026},
volume={11},
number={2},
pages={1146-1153},
doi={10.1109/LRA.2025.3632604}
}