Lyapunov-Stable Polynomial Imitation Policies
Oct 26, 2023
·
1 min read
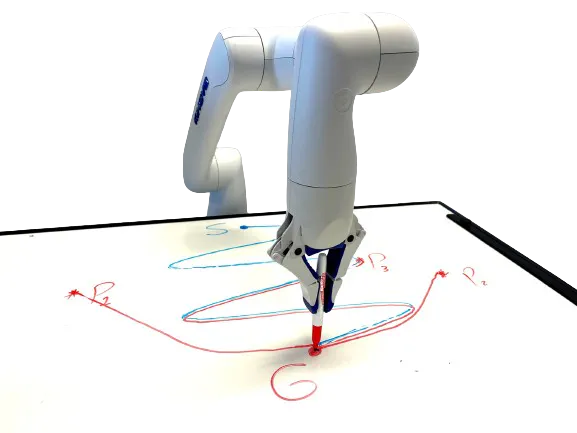
Learning polynomial imitation policies with guaranteed stability and out of distribution recovery.
Learning polynomial imitation policies with guaranteed stability and out of distribution recovery.