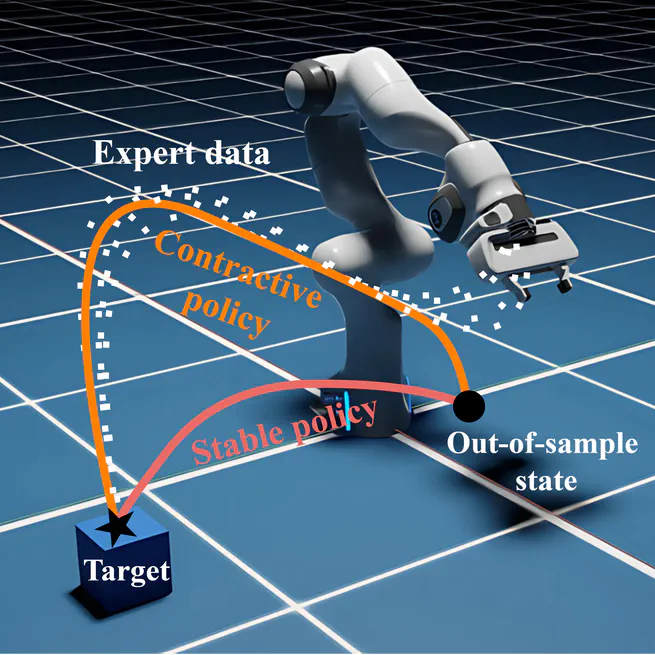
Contractive and Robust Imitation
[Ongoing Project] Learning unconstrained and stable imitation policies from state-only expert demonstrations applicable to a variety of robotic platforms. Experiments and simulations are entirely conducted in Nvidia Isaac Lab and Isaac Gym. The project is funded by a competitive scholarship from the Swiss National Centres of Competence in Research (NCCR Automation) in collaboration with EPFL.
Apr 28, 2024