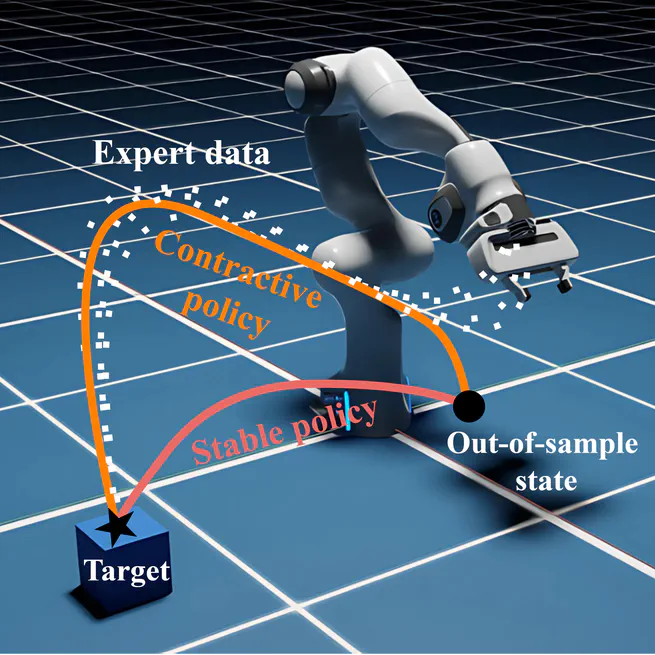
We introduce a class of contractive imitation policies with theoretical guarantees and out-of-sample error bounds for robot learning.
Aug 22, 2024