
Globally Stable Neural Imitation Policies
In this project, we developed the Stable Neural Dynamical System (SNDS) to improve imitation policies by ensuring stability of the trained policy. Our approach uses a neural policy architecture based on the Lyapunov theorem to provide formal stability guarantees. We jointly train the policy and a Lyapunov candidate to ensure global stability.
May 10, 2024
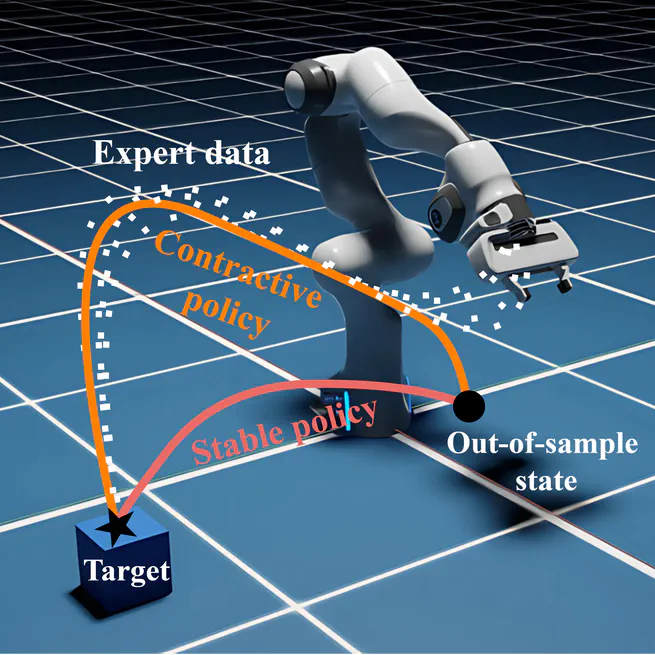
Contractive and Robust Imitation
[Ongoing Project] Learning unconstrained and stable imitation policies from state-only expert demonstrations applicable to a variety of robotic platforms. Experiments and simulations are entirely conducted in Nvidia Isaac Lab and Isaac Gym. The project is funded by a competitive scholarship from the Swiss National Centres of Competence in Research (NCCR Automation) in collaboration with EPFL.
Apr 28, 2024

Stable Neural Imitation Policies
Learning globally stable neural imitation policies (SNDS).
Oct 26, 2023